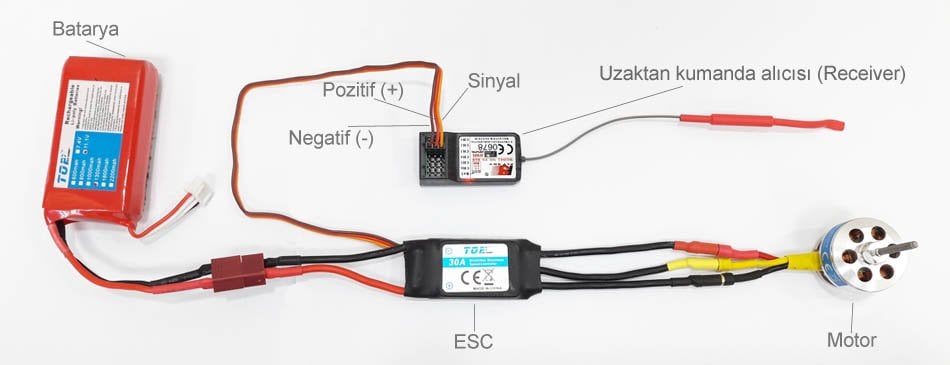
Merhabalar, bu günlerde ihtiyacım olduğu kolay üretim şekli ve çalışma algoritmasıyla motorları çılgına çeviren elektronik kartın şahsen üretimi ile karşınızdayım evet başlıkta da okunduğu gibi droneleri şaha kaldıran ESC motor hız kontrolcüsü yapmak için işe koyulalım.
ESC kullanım şekli
Tasarım konusunda piyasadakilerden çok da ödün vermeden konuya gireyim istetim, aslında boş bir zamanın ardından ve kırık bir ayak ile evde sıkılmaktansa bilgisayarda bir kaç proje fena olmazdı diye düşünerek daha evvel tasarlamış olduğum İvme sensörü destekli flytracker projesine uygun bir proje olması da gerekiyordu bu projeyi drone ile test ederken neden başka bir ekipmanını sıfırdan tasarlamayayım ? evet gene söylemek istiyorum Amerikayı baştan keşfetmek için biraz geç kaldım. Sonunda ESC yapmak için harekete geçtim evet.. Çok şaşırdığım fvp droncuların hazır aldıkları sistemleri kapitalist bir yaklaşımla konuyu sadece kınamak istemedim sonuçta bizde bu sistemin bir parçasıyız ve alt parçaları da olabiliriz. Yakınsamaktan çok bu projeye neden ihtiyacım var olduğunu düşünmem için bir kaç saat film izlemiş olabilirim ve yapmak için işe koyuldum Bir devre kartı tasarlarken o kartın ne iş yapacağı sadece bir fikir tarafı: %50 iş bitirme gerçekleştirmesi diğer yanı ise pcb tasarım işi, kod analizi, elektiriksel hesaplamalar, kullanılacak eleman seçimleri, mosfet ve gate sürücü hesaplamaları gibi bir takım ve listeyi uzatan seçimlerin yapıldığı.. durun işte aynen böyle; ıslak uyanılmış bir rüya dan sonra yatağın diğer tarafının boş kalması ile aynı sıkıntılı durumu anlatıyor olsa gerek (özgürlük ve ciddiyet bazen iş kaçırabilir) diye düşünerek..
Tasarım ve fikir zaten hali hazırda mevcut olabileceği ve benim durumuma ek bir özellik gerektirmeyeceği için orayı es geçerek anlatacağım gate sürücüleri de anlatmak isterim fakat orayı da alıntılıyabilrim çünkü üzerine durduğum tek yer yazılım ve donanım üretimi olduğu yüksek akım tasarlarken signal kablosu kullandığınız bir devre kartında 2 katlı bir pcb nin yeterli olabileceğini ama elektromanyetik uyumluluk EMI ve girşimleri EMC çok fazla kafaya takmadan yapılabilecek bir proje olmasından dolayı orayı da es geçtim aslında yazılım dışında çok zorlanmadığım bir tasarım furyasına giriş yapmak üzere olduğumu farkettim yüksek frekanslı faraday kafesi gerektirecek bir verici devre kartı tasarlamıyorsun Hamza diyerek işe koyulmanın önceden yapılacak hesaplamaları bile es geçmeme sebep verebilir. ( EMC ve EMI hakkında uzun soluklu proje için bilgi tazelemek benim fena olmazdı.) başlayalım.
ESC Çalışma Yöntemi
Üç fazlı fırçasız DA motorun şematik diyagramı
..Fırçasız DA motorunun geçiş yerlerini, Hall Effect sinyallerini çözerek belirlenmektedir. Altı aşamalı değiştirme tekniği, fırçasız DA motorun üç fazlı motor sürücünün altı adet MOSFET sırasıyla değiştirmek amacıyla kullanılmaktadır. Belirtilen bu yöntemle, her bir sinyal çıkışlarında MOSFET’ler üç fazdan iki tanesini enerjilendirirken tek faz pasif konumda kalmaktadır. Anahtarlama dizilerinin ters çevrilmesi motorun dönüş yönünü değiştirir. Motorun hızı, Hall Effect sensörü sinyallerinin genişliği ile doğru orantılıdır. İdeal hat gerilimleri, geri EMF gerilimleri, komütasyon sinyalleri, faz akımları ve üç fazlı fırçasız DA motorun altı kademeli anahtarlaması şekil’ de gösterilmiştir.
Üç fazlı fırçasız DA motor sinyalleri ve anahtarlama örüntüsü
Fırçasız DA Motorlarda Manyetik Alan Ve Manyetik Akı Hesaplamaları
H=N*I/L Burada, H manyetik alan şiddeti,
N sarım sayısı, I akım şiddeti,
L stator kol uzunluğu B= µ *H veya B= µ (H+M)
Burada, B manyetik akı yoğunluğu, µ = 4π* 10-7 manyetik akı geçirgenliği,
M silisyumlu sacın manyetik geçirgenliği.
Mcu Seçimi
Esc, için mcu seçiminde dikkat edilmesi gerekilen nokta giriş ve çıkışları belirleme ve ardından bu gereksinimleri sağlayacak ucuz mikroişlemci seçimi yapmak bunun için genelde arm mimari kullanılan mcu işimi görecektir sonuçta kahve makinesinden farksız daha az pid gereksinimi duyan pwm üreticisine ihtiyacım var aslında analog entegreler bile bunun için yeterli olabilir fakat birden fazla entegre ve kalabalık bir devre kartı herhalde günümüz elektronik furyasında biraz iyk olurdu.
Atmega8 - 328, Silaps, Attiny veya Stm32 mikroişlemcileri Arm tabanlı birden fazla Timer içeren basit yapılı beyinleri işimi göreceğinden dolayı piyasa fiyatı 20 - 30 TL ile 4 adet ESC için baştan kendime bir fiyat düzeni uyguladım, kısaca STM32F051'in iyi bir seçenek olacağını düşündüm.
FIRÇASIZ MOTOR
Fırçasız motor iç gösterimi
Rotor tarafından oluşturulan dönen manyetik alan fırçalar ve komütatör yardımı ile meydana gelir. Komütatör ve fırçalar rotorun pozisyonuna göre rotor sargısı üzerinden geçen akımın yönünü değiştirerek dönen manyetik alanı oluşturur.
Şekilde gösterildiği gibi motorun iç yapısını gösteriyor genelde drone veya quadcopter gibi rc araçlarda bu motorlar sıkça kullanılır tabi benzinli olanları ayrı bir dünya..
Resimdeki motorda 6 dan fazla komütatör var fakat normalde 6 komütatör kullanılmaktadır. Bu motorlar genel bir tabirle az ekmek çok iş yapabilen AC 3 faz (phase) sinüs dalgasıyla çalışmayı destekler ve böylelikle verimlilik ve potansiyel kazanç fazladır ayrıca yüksek hızlara ulaşabilir. (24k Rpm)
BEMF
BEMF veya Geri Elektro-Motive Kuvveti, bir manyetik alanda bir bobinin dönüşü ile oluşturulan, polaritede zıt olan, çok işlevli bir kod çözücü tarafından ölçülebilen ve geri besleme olarak kullanılabilen bir voltajdır. Bu alıntı bilgi ile emf yi net olarak tanımladık şimdi nasıl yaptığımıza bakalım.
Bir motor tarafından geliştirilen maksimum tork, E BEMF = V Besleme ÷ 2 denklemine eşittir .
Rotor pozisyonunu belirlerken stator sargılarında indüklenen zıt emk’ya göre bu dedektörlerden faydalanmak mümkün olmaktadır. Sıfır geçiş dedektörü motor sürücüsüne bağlıdır ve rotorun konumunu belirlemek için, besleme gerilim değerinin yarısı ile statordaki faz sargılarına uygulanan gerilimi karşılaştırmak gerekir. Bu sensörlerin avantajı, hareket eden parçasının olmaması ve motordaki hareket eden diğer parçalarla bağlantısının olmamasıdır. Aşağıdaki şekilde bu dedektöre ait yapısı ile bağlantısı gösterilmiştir.
Açıklamaya göre, rotor pozisyonu belirlenerek çıkış pwm sinyalleri yani hangi mosfetin açılıp kapanacağı gibi bazı sorular için bize bir cevap olur.
Gate Sürücüler
Boostrap gate driver
Projede IR2101S kullanılmaktadır.
Mosfet sürücü bu projede çok önemli bir yerde çünkü pwm sinyalini motora göndermek için bir mosfetin nasıl kullanılacağı ve sinyalin frekans yada duty cevabına göre doyumda olup olmaması çekilecek akımı doğrudan etkiler ve motora gönderilen akımın doğrudan akmasına veya kısmen akmasına sebep olacak olan high side ve low side durumlarını bir ele alamamız gerekiyor sonuçta patlamış mısıra dönmüş pahalı kuzucuklar için üzülmemiz gerekmiyor bir çaresi var bla bla...
Burası biraz sıkıcı gibi geldi sonuçta amerikayı tekrar keşfe çıkmak elbette sıkıcı bir iş gibi gözükmeyebilir ama öyle
.... 80 amperin üzerinde, düşük Rds ON değerine sahip NPM kanallı 25 volt üsttünde herhangi bir mosfet seçebilirsiniz
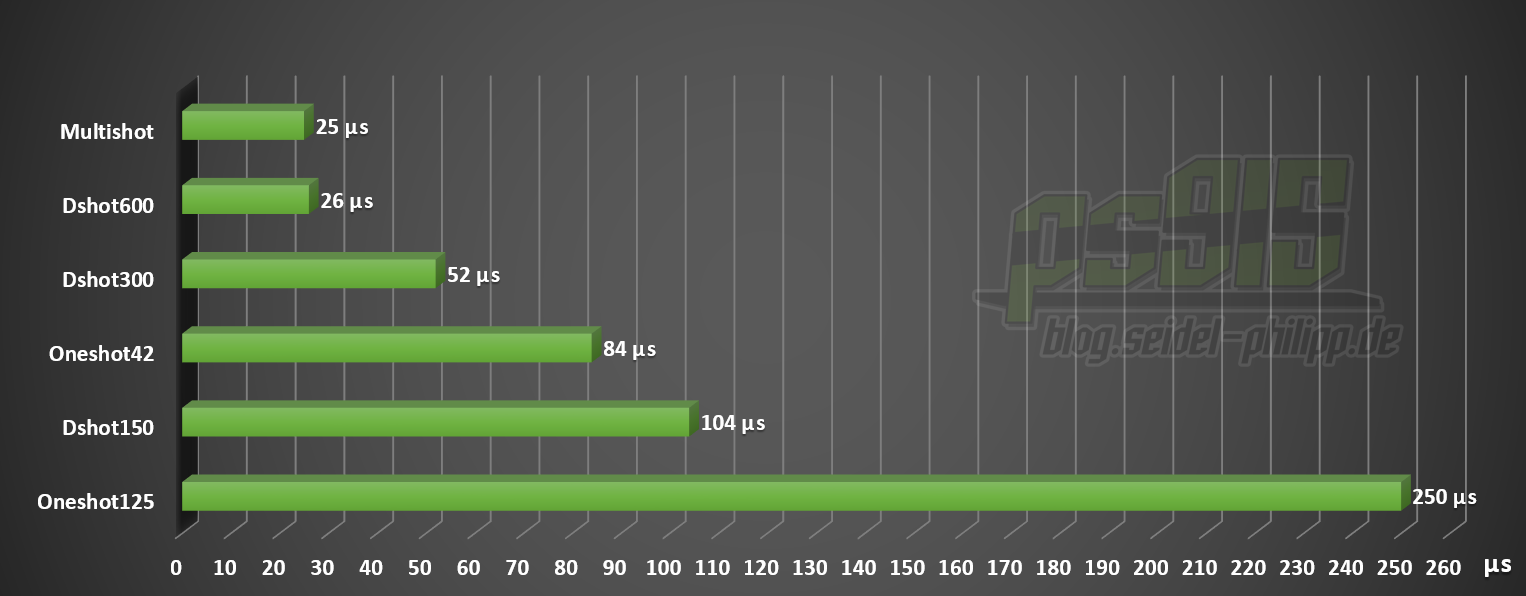
Pwm sinyali, Dshot, Multishot , TIMER Zamanlayıcı
Haberleşme protokolleri esc ler için geliştirilmiş hali hazırda modulasyon sinyali olan bütün donanım/yazılımların adeta virgülü haline gelen PWM sinyali ve diğer sinyaller, bu haberleşmek için sinyalin dutty değeri ile Usart benzeri sabit hızları olan sinyaller veya dijital sinyaller olabilir ESC işlemcimiz ana görevini icra ederken bir yandan da girişi dinleyerek çıkışa yönlendirmek zorunda eğer giriş sinyali bir şekilde kaybolursa Esc, çıkış modulasyonunu durduracaktır bu iletişim kopukluğu, uçuğu sırasında yaşanırsa facia olabilir yüksek mertebede duran motorların cihazın bir kaç saniye sonra üreticisine söverek parça arayan drone sahibi ile aramızda bir diyalogu başlatabilir bunun olmasını istemeyerek bu konuyu biraz anlatmak istiyorum..
Timer bizim için biçilmiş kaftan donanım üreticilerin bulduğu, şekersiz çay olur mu diyenleri anlamamı sağlayacak bir donanım yönetim sistemi kendi başına bir roma imparotoru ve bunun içinde biraz adil bir sistem. Bu donanım, içeride gerekli olan İnput sinyalini (yukarıda zaten bahsettik biraz da aşağıda değineceğiz) DMA kullanarak yakalamak ve anlamak ve bu sinyalden yola çıkarak motorumuzun hızını değiştirmek için rotor konumu hakkında bilgi toplayacak anında pwm pulse sinyali için için yardımcı bir görev olarak çalışacak, CPU ana loop, bilgiyi toplama konusunda vakit kaybetmeyecek ve ana döngü ile yakalayıcı donanımların frekansları karışmayacak herkez musmutlu evine dönecek.. ııg ıgmm.
PWM motor frekansı için çok fazla PWM sinyalinin periyodu 2ms bu giriş sinyalinin frekansını bize söylese de yakalayıcı timerların, ana döngüden bağımsız bir frekansta çalışması gerektiğini anlatyor ve bu duruma hak veren diğer sinyaller, Dshot, Multishot iletişim protokollerinde paket boyutu yaklaşık 25us civarında bu sinyal frekansının 1mhz'e yakınlığını anlattığı için giriş modunda timer frekansını belirleyici etki sağlayacaktır.
Bir diğer nokta GPIO çıkışları direkt cpu ana program fonksiyonu ile kontrol etmek yerine yerine PWM sinyal çıkışı verebilen işlemciyi yormayan görevli meleklerimiz Timer PWM genaratör leri kullanacağız, toplamda 6 çıkış var 3 Pozitif ve diğer 3 ü ölü zaman farkı ile negatifi. Böylece işlemci giriş sinyalinin hesabı, rotor dönüş yönü, akım yada gerilimler, adım bilgisi verilerini işlerken arka planda zamanlayıcımız gate sürücüsüne gerekli pwm çıkışı vererek hem doğru iş yapacaklar hem de sinyale ara vermeyecek, mosfetlerimiz yumurta pişirmemiş olacaklar.
Sistem bekçisi Whatcdog ana döngüde yolunda gitmeyen durum fark ettiğinde kısaca 24 khz frekansında başa dönmediği zaman bir terslik olduğunu farz ederek işlemciye reset atacak böylece çıkışı durduracak hem mosfetleri hemde motoru veya ters bir durumda çıkışımızı koruyacak bunun dışında sistemde akım ve gerilim okumaları eklersek çıkış akımı veya ters akım koruma alt sistemleri de ekleyerek ESC yi daha güvenli hale getirebiliriz ama ben son 2 koruma devresini dahil etmedim.
Koruma derken es geçmeyelim havada yanmaya başlamış bir drona henüz rastlamamış olsamda mosfetler yüzünden ısınan dış kablolar yangına müsait bir ortam yaratabilir mosfet sıcaklığını bile sisteme dahil edebiliriz.... bla bla
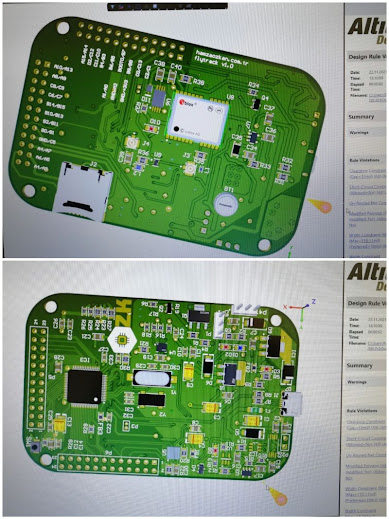
Final! PCB kart tasarımı
İşte bu bebeğim astavista!!!
Gel gelelim işin en çılgın noktasına bu tasarım şuan da inanılmaz gözüküyor evet lehim yerlerini adeta patlayacak şelale gibi açılımda bulunarak biraz olsun gevşemeye hazır bir canlıya çevirdim, adeta evrimin sırlarını açıklayacak nitelikte kontrolcü, evlenmeden önce sizi bekarlığa veda partisinde gazlayan eküriniz gibi durmuyor mu ? hadi oğlum bu tam senlik diyen amcanızın sizi gazladığı gibi ahenkle güç verecek gibi duruyor, baktığımızda bir şeylerin yerden havalandığını fark ettiyseniz..
Sözün özü tasarladığımız proje aşağıda arkadaşlar şimdi ise test ve yazılımı kontrol etmede....
Espride geri kalmadığım durumların işimi son derece sevdiğimi anlatmama gerek olmadığı kaanatindeyim ama açıklamak istiyorum v1.0 hali ile EAGLE ile tasarladığım bu pcb için eleştiriler son derece önemli.
Malzeme listesi
STM32f051 LQFP-32 kılıfında bir ic,
3 adet mosfet sürücü IR2101S,
P-TDSON-8 kılıfında 85 Ampher 30 volt 3.2 mohm N channel 6 adet mosfet ,
BEMF devresi için 3x10k, 6x33k, pull res. 10k,
8 mhz kristal 20pf ,
5 volt için 2x78m05
mcu beslemesi için L11173v3 ldo entegresi kullandım 12, 5, 3.3 gerilim hattları için 22uf, 100nf kondansatörler kullandım. hepsi bu kadar gelecek projede görüşmek üzere sağlıkla kalın.
Özet
Bu yazının asıl amacının bu projeyi sadece yazı veya referans görsellerle bırakmamak kaydıyla bir işe koyulmanın ilk adımı diyebilirim, çok özverili bir şekilde yapmaya başladığım yaparken hem anlayıp hemde anladıklarınızı bir yazıya dökmeniz oldukça zaman gerektiren kıymetli şeyler bu postu yazarken çoğu es geçtiğim önemli detayların aslında altını çizmek için bir fırsat totemi olarak düşünüyorum sonuçta kıymetli olanın pek de üzerine düşmediğimiz gerçeğinin bir insan doğası olduğunu kabullenmem sadece bu posta özel bir durum değil anlayışınıza sunarım.
Üst görünüm
Alt görünüm mosfetle birlikte
Kod
Özel tasarlanmış pcb için özel tasarlanmış yazılım olmak zorunda değil sonuçta aynı görevi olan bir mikroişlemcinin yazılımda sadece gpio farkı olur veya özel olarak eklenecek devrenin örneğin akım okuma, led çıkışı hall efecct sensörü okuma veya multishot, oneshot protokol desteği yazılıma eklenebilir. Kullandığım MCu bu proje için diğer stm32f0xx lerden tek farkı paket boyutu LQFP-32 olmasından dolayı yazılımda hiç bir değişiklik yapmayacağımı anladığımda piyasada ki çoğu esc firmware yazılımlarının aynı mantıkla çalıştığını biliyoruz böyelikle sözün linki aşağıda..
Merhaba arkadaşlar daha önceki yazımda size 16 Bit için teorik olarak Dijital Analog Converter dizaynı yapmıştık Arduino mikrodenetleyicisi ile kontrol edebildik bugün ise bu tasarımın devre şemasını ve Altium çizimini sizinle paylaşmak istiyorum. 480 Khz sinyal için diffarantiel pair olayına girmedim her bir direnç arasındaki mv cinsinden kaybı yazılım ile tolere edebiliriz. Bu devre kartının malzeme fiyatı yaklaşık 10 lira günümüzde 16 bit D/A için 10 dolar üzerinde entegre/modül fiyatı bulunuyor.
Çıkışında Low pass filter var 47nF bir kondasatör için 1 Khz de orjinal sinyale çok yakın bir görünüm veriyor yakın bir zamanda kartı sipariş edip testlerini yapacağım. Onun dışında delikli pertinax ile deneysel bir devre tasarımı yaparak deneyebiliriz.
Merhaba arkadaşlar, bugün Mikroişlemci ve elektronik dünyasının vazgeçilmez çevrim işlemi olan dijital bir verinin analog olarak çıkış yönteminden bahsedeceğim.
Günümüz dünyasında haberleşmenin elektronik için önemi büyük basit bir örnek ile açıklayım mikrofondan gelen analog sinyali uzaya taşımak istiyoruz ama bu datayı kimse çözemesin? analog olan bu sinyalin sayısal bir karşılığını kullanarak bu veriyi kripto edebiliriz karşı taraf da bunu tekrar çözüp ses sinyaline çevirmesi gerek.
Eğer elektroniğe meraklı ve yeni öğrenen biriyseniz çoğu terime yabancılık çektiniz o halde Analog ve dijital sinyalden bahsedelim.
DAC akış gösterimi
Analog Sinyal
Fiziksel sistemlerdeki ısı, sıcaklık, basınç, ağırlık, nem oranı, ışık şiddeti, ses şiddeti gibi büyüklükler olarak değişirler nedir bu analog? Bu büyüklükler elektronik ortama aktarmak için bazı enstrümanlar kullanırız mikrofon, sıcaklık sensörü yada bir kamera cihazı; ses, ısı, ışık gibi büyüklükleri genlik, akım, faz açısı veya frekans gibi elektriksel sinyallere çevirirler bu sinyaller anlık olarak düzgün olmazlar çok fazla gürültülü olabilirler iki kablo içerisindeki sinyal birbirine manyetik & endüktif etkiye sebep olur birbirini bozabilir iyide dijital sinyal de böyle bir problem yok mu? yüksek frekansta çalışıyorsak var tabi şş orası sonra.. :) .
Analog sinyallerde bir ortamdan başka bir ortama taşınırken elektriksel özellikleri kolay değişebilir, kayıp yaşanabilir bozuk sinyal işimize pek yaramaz dijital sinyal ise az bozulmaya uğrar kısaca hdmi ile svideo sinyali arasındaki fark gibi püf noktamız bu olsun.
Analog sinyaller sadece duyulabilir sinyaller olmayabilir eskiden teknoloji bu kadar gelişmiş değildi analog sinyaller kendi aralarında çevrimi yapılıyordu yani modüle edebiliyorduk yada genlik ile oynuyor faz açısını değiştiyor yada filtre ediyorduk ama bu analog in out için biraz mekaşetli ve pahalıydı çok fazla devre elemanı gerekiyordu eski radyoların içini açın birde şimdiki radyoları boyutları epey küçüldü işte sebebi herşeyin dijital olması bu sinyallerin işlenebilmesi için devre elemanına ihtiyacımız yok. Mesela yeni nesil radyolarda rezanatör devresi bile yok çünkü mikroişlemciler geliştiğinden beri yazılım ile sayısal veriler ile oynamak kolay. Lütfen SDR için bir araştırma yapın ne dediğimi anlayacaksınız:) şimdi dijital sinyali kavrayalım.
Analog sinyal gösterimi
Analog sinyal, T zaman aralığında [v1, v2, .. vn] kadar gerilim değeri alabilir bu gerilim kümesi iki referans gerilimin arasında zamana bağlı olarak değişir örn 3.567 volt olabilir.
Az önce farkettiğimiz gibi 3.567 volt bir gerilim değeri ve T zaman aralığında, onlarca değerden bir tanesi, zamanı ne kadar daraltırsak virgülden sonraki sayılar giderek sabitleşir. Analog sinyalin bir frekans oluşundan kaynaklı olmakla frekansın değişken özellikte olması bu gerilim değerinin zaman içerisindeki değişimi ile doğru orantlıdır. f = 1/T formülü ile T yani zamanın bize frekansı verdiğni anlarız.
Bu blog yazısı DAC için yüzeysel formüller mantık anlatımı ve resim destekli similasyon çalışması içerir.
Dijital Sinyal
Dijital sinyal gösterimi
Yukarıdaki görsel dijital sinyali görüyoruz bu sinyal yani bu veri kümesi elektrikte 1 açık ve 0 kapalı anlamına gelen 2 lik koddan oluşur matematik modellemede binary taban sayısıdır. Dijital sinyal T zaman aralığında, TTL veya CMOS transistör modellemesinde 5.0 veya 3.3 voltdur mesela TLL de' [1:5 Volt 0: 0 volt] olmak üzere 2 farklı değer alabilir..
Örnek, 256 decimal (10luk taban) Binary karşılığı 11111111 olarak kodlanmıştır 256 = 2^8 in karşılığıdır.
Burada görüleceği üzere 256 Decimal sayısının karşılığı ikilik düzeyde 8 Bit anlamına gelir, her bir bit ikili sayıdan oluşur 1 ve 0 mikroişlemcilerin anlayacağı elektriksel dilin matematik gösterimidir.
Örneğin, ilk kez makine diline çevrilmiş meşhur 2 kelimeden oluşan Hello World ikilik koda çevrilirse:
Şeklinde olur. Her bir karakter 8 bit uzunluğundadır ASCII kodu olarak tanınır latin alfabesinin 7 bitlik bir karakter kümesidir İlk kez 1963 yılında ANSI tarafından standart olarak sunulmuştur.
Elbette aranızda bilenler vardır binary ikilik kod sistemi yazılım dilinde byte olarak tanınır ve her zaman hex veya decimal karşılığı bulunur 8 bit 1 bayttır matematikte anlatılan taban sistemi olan bu bilgileri lütfen araştırın..
İkilik kod, açık ve kapalı şeklinde olup elektrikte kullanabiliyoruz kapı devreleri, sayıcılar, register, flip flop vb transistör devreleri bir araya geldiklerinde veri depolayabilirler toplama, çıkarma veya diğer işlemleri yapabilirler. Matematik işlemini 1 mhz hızda yapabilen bir işlemci 1960 lı yıllarda çalışıyordu tek yapmamız gereken matematik modellerini dijital ortama aktarıp işlemek bir ses sinyali işleme fikrini geliştirmek o yüzden uzun sürmedi zaman geçtikte transistörler arttı ve mikroişlemcilerin işlem kapasitesi ve hızı da arttı şuanda Ghz seviyesinde.
Şimdiye kadar sadece matematik ve bilgisayar dilinden bahsettik sayısal veriyi anlamış olduk bilgisayarların ve transistörlerin aç ve kapa özelliği ile aritmetik işlemler yapabilen yonga setlerine kısaca mikroişlemcilerin dünyasına teorik olarak göz attık bu yazı epey uzun soluklu olabilirdi henüz işin matematik tarafındayız.
Fakat bu yonga setlerinin nasıl çalıştığı ram, rom, cpu, io, saat frekansı, timer... Gibi kavramlarını başka bir makalede ele alabiliriz.
Şekil 2 Dijital Analog sinyal
Analog ve dijital sinyali anladık şimdi ise dijital sinyali nasıl analog sinyale pekala DAC nın ne olduğuna bakmanın tam sırası..
Kısaca DAC Nedir ?
Başlıkta da yazığı gibi yukarda yazılanlardan yola çıkarak Şekil 2'deki sinyal tablosunun sağdan sola Dijital sinyalin (DAC, D/A, D2A, veya D-to-A) Analog sinyale dönüştürme veya birbirine çevrimi diyebiliriz. Örneğin, MP3 dosyasını insan kulağının anlayacağı şekle yani ses dalgalarına büründürmek gibi..
Dijital çıkış verebilen bir mikrodenetleyici ile başlayalım bu çok bildiğiniz Arduino Uno kartı işlemcisi olan Atmega328; seçimi ile bugünkü projede kullanacağız. Donanım konusunda iyi şirketlerin kullandığı Stm32, Arçelik gibi firmaların kullandığı AT80xx işlemciler olabilir ve çoğunun giriş çıkış, hız vb donanım özellikler değişkende olsa amaçları aynı.
Mikroişlemci ile ürettiğimiz dijital SİNÜS sinyalinin bozulmaya uğramadan osiloskopta görmek için bazı donanımlar kullanmamız gerekir. Bu harici donanımlara genelde DAC entegreleri diyoruz. Bu makaleyi yazmamdaki olay hikayesi, tonlarca DAC anlatımı blog hatta haber siteleri olsa da teknik olarak inceleyip gerçek bir deney ile minumum 3 dolar olan bu entegreleri nasıl 1 dolara imal edebiliriz sorusu ile başladı.
İşlemci üzerindeki dahili donanımlar gerçek proccessing işlemleri için yeterli değil Arduino gibi bir geliştirme kartı DAC İşlemi için PWM yöntemi kullandığını anladığımızda bu iki noktanın kavramını bu makalede anlayabileceğiz çünkü, DAC için mutlaka harici donanım kullanacağız LPF de dahil.
Nasıl ?
Analog değerler zamana göre sürekli (kesintisiz) olduğundan, bütün zaman dilimlerine
karşılık gelen bir analog gerilim değeri vardır. Her analog değer için bir dijital değer
oluşturmak karmaşık ve maliyetli olacaktır. Bu nedenle analog
değer üzerinden belirlenmiş zaman aralıklarında örnekler alınır. Her örnek için seviyesine
göre kodlanmış dijital bir değer üretilir.
Referans gerilim değeri bu yüzden vardır -Ref ve +Ref sinyal üretilen analog sinyalin minumun ve maksimum değerini ifade eder.
Şekil 3 DAC matematiksel modeli
DAC işleminini matematiksel ifadeler ile doğrudan anlayalım Şekil 3'e bakacak olursak sol taraftaki n kadar bit uzunluğunda dijital binary kodlaması görülüyor. Yukarıda anlattığım gibi örneğin n=16 bit sinyal 65536 farklı değer alabilir (2^n) bu 16 sıralanmış ikilik koddan oluşur. DAC işleminde gerçek analog sinyale ne kadar çok yaklaşırsak çözünürlük dediğimiz resolution yani n o kadar artar ve sinyali daha kaliteli elde edebiliriz.
Grafikte okunnduğu gibi, negatif ve pozitif referans değeri arasındaki çözünürlük;
V+ref = 5.0 volt
V-ref = 0 volt
n = 8 bit
Q = (V+ref - V-ref ) / 2^n = (5-0)/256
Q = 0.01953125 volt
Tablo 1 8 bitlik bir DAC için çıkış değerleri
Her bir adım yaklaşık 0.02 volta karşılık gelmektedir. Kısa bir deyişle 0-5 volt aralığını n=8 bit, 256 adet eşit aralığa bölmüş olduk. İşte kavranması gereken nokta burası çözünürlük n kadar bit değeri ile doğrudan ifade edilmesinin sebebi ref gerilimin adım aralığı ile artıyor. Tablo 1'de örnek değerler gösterilmiştir.
Vmax değeri maksimum digital kodun (n=8, 256) max referans gerilimin 1 bit aşağısında kalmaktadır.
(256)10 = (11111111)2 sayısı yaklaşık 4.98 volt analog çıkış gerilimi ile ifade edilmektedir. bu hata örnekleme hatası olarak adlandırılmaktadır.
Vmax = 5 volt ve n = 16 bit olduğunda 65536 farklı sayısal kod farklı gerilim değerini ifade eder adım aralığı artmış olur. Dezavantajı çözünürlük maliyet ile doğru orantılıdır günümüzde 16 bit DAC entegreleri minumum 5$ dan aşağı satılmazlar.
Çıkış gerilimi V(x), ile x burada digital kodun decimal karşılığı anlamına gelir.
V(256) = x*Q = 256*0.01953 = 4.9800 volt
R-2R Kedi Merdiveni
R-2R yöntemi op-amp ile beraber direncin gerilim bölücü özelliği kullanılarak D/A dönüşümü yapılabilir her bir R-2R direnç bölmesi Şekil 4'deki gibi birbirine seri bağlanarak (n kadar bağlantı, n kadar çözünürlük ifade eder) şekildeki anahtar doğrudan işlemcinin dijital pinine bağlanır bu 4 bit bir D/A çevirici yani;
Vref = 5,
n = 4,
Q = 5/2^n
Q = 0.3125
V(x) = x*Q
16 adımlık dijital çevirici V(x) sinyali, x değerlerinin 16 farklı değeri ile analog sinyali bulabiliriz.
Şekil 4 Dört bitlik ikilik ağırlıklı direnç D/A çevirici
Bu tip D/A çeviricilerin bir dezavantajı direnç değerleri aralığının ve sayısının farklı olmasıdır. Örneğin sekiz bitlik bir D/A çevirici için sekiz direnç kullanılmalı ve bu dirençlerin değerleri R ile 128R arasında olmalıdır. Direncin, toleransları ve sıcaklığa bağlı olan değişimlerine bağlı olarak sonuç değişeceğinden, kararlılığı düşüktür.
R direnç değerleri, devrede R = 1k olabilir bu akımı etkiler D/A için gerilim değeri önemlidir ki zaten op-amp burada akım değerini absorve edecektir.
Vo = -Vref * (8D3 + 4D2 +2D1 +D0) * 1/16
Tablo 2 4 bitlik R-2R D/A çıkış değerleri
Tablo 2 4 bitlik, ikilik ağırlıklı D/A çeviricinin sayısal veriye ait çıkış gerilim değerlerini göstermektedir
LFP (Low Pass Filter) Mantığı
RC devresi adı geçen, genelde aktif ve pasif olmak üzere LPF olarak kullanılan şekildeki devre örneklerinden çok fazla var, aktif olanlar gerilim kazancı ile filtre edilmiş analog sinyalin gerilim kaybını önler hatta yükseltebilir. Ses frekans endüstrisinde bass filtresi olarak adı geçtiği için zamanında çok fazlaca kurduğum bir devre, op-amp ile aktif filtre devresi yapılabiliyor kondasatör seçimi ile giriş sinyalinin filtre edilecek frekansı belirlenebiliyor.
fc = 1/(2.π.R.C)
LPF ile dijital sinyalin analog benzetimi sağlanabilir aşağıdaki şekilde bulunan STM32 den alınmış PWM sinyalin duty oranına göre LPF devresi ekleyerek analog gerilim benzetimi blog şeması gösteriliyor.
İşlemcilerin dijital pinlerinden doğrudan Analog sinyal çıkışı alamayız. PWM çıkışları ise duty cycle değeri ayarlanmış dijital bir sinyaldir ki bu sinyallerde LPF (Low Pass Filter) Devreleri ile analog sinyal değerleri PWM sinyalin duty ayarı ile yaklaşık tahmini yapılıyor fakat tahmin yanı sıra analog çıkış sinyali benzetimi için bu filtre devresini kullanmak gerekli sayılabilir.
Tek başına 2-2R Kedi merdiveni devresinden daha az performanslıdır 8bit 2-2R devresinin çıkışına bu devreden koymak yine yanlış olmaz sinyali analog sinyale yaklaştırmamız harmonikleri engeller ve temiz bir çıkış sağlar.
Harici Donanım "DAC"
Çok popüler ve ucuz bir entegre devre D/A çevirici MC1408 veya eşdeğeri olan DAC0808
‘dir. MC1408 standart 16 bacaklı DIP paket olarak gelir ve +5V ’luk Vcc ile minimum -5V,
maximum -15V ‘luk VEE gerilimi gerektirir. MC1408’de, bir R/2R merdiven tipi D/A çevirici,
akım yükseltecinden gelen referans akımını, 8 ikilik ağırlıklı akıma böler. Bipolar transistör
anahtarlar (A1-A8), girişlerindeki ikilik bilgiye göre ikilik ağırlıklı akımları çıkış hattına
bağlar. En yüksek değerlikli biti taşıyan girişin A1, en düşük değerlikli taşıyan girişin A8 ile
gösterilmiştir. MSB ve LSB etiketlendirilmeleri normal etiketlendirilmenin tersinedir. Bu
nedenle kullanılacak bir entegrenin veri sayfası dikkatle incelenmelidir. Şekil 19 MC1408’in
blok diyagramını, bacak bağlantısını ve tipik uygulamasını göstermektedir.
I2C, SPI Haberleşmeli D/A
Mcp4725 DAC Modülü
Örneğin yukarıdaki şekilde MCP4725 bulduğum en ucuz entegre, günümüz dolar kuru (15.00) ile 29.99 ₺ (2$) gibi bir fiyatı var ; 12 bit (4096 örnekleme) olması aslında orta düzey işlerde yeterli çıkışta bir RC filtre ile tadından yenmez ve haberleşme protokolü desteklemesi hız olarak da yeterli özellikle SPI 4 mbit hatta 12 mbit'e kadar hız destekler.
Onun dışında söylemek istediğim, çoğu entegre kedi merdiveni devresi kullanır pahalı olmasına sebep veren şey entegrenin üretim şekli olabilir. İçerisinde bulunan dirençlerin çok az toleranslı olması çıkış sinyalindeki kaybı aza indirmesi ile doğru orantılı olduğu için iyi bir direnç seçilmesi bu kaliteyi etkileyen bir faktördür.
MAX5891 RC filtre çıkışlı block diagramı
MAX5891 16-Bit, 600Msps Destekleyen yüksek çözünürlük D/A entegresidir şuanda günümüzde 65 $ civarı fiyatı bulunmakta CMOS seviyesinde çalışmaktadır haberleşme olarak paralel port LVDS destekler
Ucuz Yöntem
74HC595 Shift Register entegresini çoğunuz biliyorsunuz eminim. Bu entegre digital bir sinyali 8 bit çıkışa ayırır. Ve günümüzde fiyatı 1 lira civarında olması çok iyi alternatif, 2 adet 74hc595 ile 16 bit çözünürlüklü R2R yöntemini kullanarak DAC tasarımı yapacağız. Yukarıdaki görsel bu tasarıma ait yüzeysel block şemayı gösteriyor Mikroişlemci olarak Arduino'dan faydanalabiliriz. Stm32 deki gibi fazla kod gürültüsü ile uğraşmadan temiz bir kod ile amacımız 16 bit çözünürlüklü sinyal oluşturmak. Aynı devre ile 4, 8, 12 ve 16 bit D/A için deneyler yapmak istiyorum.
Aşağıda D/A devre şemasının tam halini sizinle paylaştım bu şemayı bread-board üzerinde deneyeceğiz. n = 16 bit için toplamda 32 adet direnç kullandık. Hazır entegrelerden kabaca farkı giriş sinyalinin clock sinyali ile alıyor bu clock sinyalinin maksimum fc frekansını hesaplayıp, hali hazırda devrenin gerçek değerlerini ve toleranslarını hesaba katarak çıkıştaki gerilim kaybını ölçeceğiz. Pahalı olan 16 bit entegre ile sinyal farkını göreceğiz.. MAX5891 Entegresi ile çıkış özelliklerini teorik olarak karşılaştıracağım.
Arduino'ya 2^16 / 96 = 682 adımlı bir kod yazdım bu kod 16 bitlik D/A için 682 adımlık analog gerilim sinyali üretecek proteus'daki ideal opamp -15, +15 besleme gerilimi değerine ayarlandı op-amp besleme geriliminde evirmeyen girişini yükseltiği için ;
V+ref = 15 volt
V-ref = -15 volt
n = 16 bit
Q = (V+ref - V-ref ) / 2^n = (15-(-15))/65536
Q = 0.000457763672
Burada dikkat etmemiz gereken nokta 65536 adımın 682 adıma düşmesi yazılım ile adım aralığını düşürdüğümüzden dolayı her bir Q değeri aralığı yukardaki grafiğimize göre 0.04394 volt olmalı
Dönüştürülmüş analog sinyalden kesit
Yukarıdaki (Volt-Time) sinyal grafiğine baktığımda müthiş hissetim adeta yarım dolarlık bir D/A entegresi tasarlamış oldum. İşlemini kabaca anlatabilirim aslında grafik testere uçlu bir sinyali gösteriyor olsa da aklınıza gelebilecek her türlü analog sinyalini üretebiliriz. Ses sinyali de buna dahil olsa da kaliteli bir ses frekansı alabilmemiz için bazı detaylara takılmak gerek PCMXX entegrelerinin neden pahalı olduklarına da hiç şaşmamalı.
Dönüştürülmüş analog sinyal çıktısı
Biraz amatör bir iş yapmış da olsam 16 bit D/A elde etmiş oldum yüksek sıcaklıklarda ve düşük sıcaklıklarda bu devreyi pratikte deneyerek kontrol etmek istiyorum.
0 ile 65536/96 aralığında decimal dijital sayının 0 - (-15) volt aralığındaki dönüştürülmüş gerilim grafiğini clock, data, latch sinyali ile birlikte göstermektedir. Bir üstteki sinyal grafiği zoomlanmış hali olanı gösteriyor bariz farkla dijital kodun shift register aracılığı ile her latch ediltikten sonra sinyalin referans sinyale bölünmüş oranını aynı şekilde gösteriyor. Kabaca 0, -15 volt gerilimi 65536/96 oranında bölmektedir.
Bir problem var !
f = 1/T
fc = 16Mhz = 62.5 ns
Ts - Ti = 249.143 - 249.368
Ts- Ti = 0.225 ms
= 225us
f = 1/225us = 4.444 Khz
Hesapladığımız zaman 62.5ns mikroişlemcinin (Arduino UNO Atmega 328) saat darbe frekansı yani zaman aşımı süresi.
Proteus similasyon aracında (ideal ortam) Arduino ile 74hc595 için haberleşme hızını 225 us zaman aşımı süresi ölçtüm. Ölü zaman aralığı olduğundan; çıkıştaki analog sinyal bu süre boyunca bir önceki durumu ile değerini çıkışta korur zaten arada op-amp devresi buffer olarak çalıştığı için sürekli olan sinyalde kopmalar olmaz register bir sonraki data için durumunu koruyor.
Mesele şu ki 4.44 Khz Bant genişliğimiz bulunmakta bir ses örneklemesi 44.1 Khz bant genişliğinde çalışır yani bu değerin 10 katı. 74hc595 ile haberleşme süresi Arduino'nun çıkış zaman aralığı ile bağlantılıdır. Yazılımda shiftOut fonksiyonunu kullandık Arduino kütüphanesinin hazır bir fonksiyonu olmasından dolayı aşımını değiştirmek için kodu yeniden düzeltmemiz gerekiyor. Bildiğim kadarıyla ardunio dijital pin çıkışı frekansı 8 Mhz kadar destekleyebilir. 16 Bit ses sinyali işlemek için bir yöntem olması gerek yoksa bir işe yaramaz tabiki en azından ses üzerinden örnek verdiysem de sinyalin 4.4 Khz ile sınırlı kalmaması gerek.
74HC'nin datasheet incelemesinde giriş ile çıkış arasındaki zaman aşımı 1us yani 1 Mhz hızına kadar çalışabiliyor. Buda bir ses frekansı işlemek için çok çok yeterli. Hatta bir video sinyali bile işleyebiliriz.!!
Çözüm: SPI Donanımı ile haberleşmek
Diğer çoğu d/a entegrelerinde olduğu gibi donanım yüksek frekansta haberleştiği için bant genişliği yeterli.
Arduino forum sayfasında 74x595 için digitalWrite komutu haricinde maksimum 32 Khz civarı bir hıza ulaşıldığı tartışılmış, bu fonksiyon komutunun dışında bir kod ile sağlanmış shiftOut fonksiyonu da aynı şekilde digitalWrite fonksiyonunu kullanıyor buda hızı sınırlıyor.
f = 1/T
Ts - Ti = 77.28520 - 77.28280
Ts- Ti = 0.0024 ms
= 2.4us
f = 1/2.4us = 450 Khz
#digitalwrite speed
t = 4.64us
Sonunda SPI ile 450 Khz haberleşme hızına ulaştım. Müthişşş!!!
16bit Latch Clock, Data dijital port çıkış grafiği
Grafikte en üstteki latch sinyali dijitalWrite komutu yavaş olduğundan spi data gönderme işlemi bittiği halde zaman kaybı yaratıyor az da değil 4.64us o yüzden Arduino kodu dışında farklı bir yöntemle latch yapmamız gerekiyor. Belki Ardinonun frameworkü bu bakımdan tercih edilmeyebilir..
Stm32 için özür dileyebilirim bir kaç sigorta ayarı, spi ile sağlam bir iş çıkartabilirmişiz. Cortex M ile awr ailesi tartışmamalı.. :)
digitalWrite(pin_latch, LOW);
SPI.transfer16(val);
digitalWrite(pin_latch, HIGH);
Final: Çıkışa LPF Ekleyelim
Sonuca ulaştığımıza göre gözle göremeyecek kadar küçük bir sinyal olmasına karşın eğer çıkış frekansımız belli ise de çıkışta bir LPF kullanabiliriz neden olmasın. Genelde aktif LPF kulladığımdan bu projede de bir opamp olmasından dolayı sadece 1 kondasatör bu işi çözebilir mi ? evet bence çözebilir..
Bakın bakın sinyalin analog sinyale ne kadar yakınlaştığına bakın ve böylelikle teorik olarak projeyi tamamladık bir sonraki yazıda bu projenin deneyini yapacağım elimdeki osiloskop bu iş için gayet yeterli diyede düşünüyorum.. Teşekkürler.
Merhaba arkadaşlar, uzun zamandır yoktum evet buraları işden dolayı biraz ihmal ettim farkındayım takipçilerimden bir özür borcum var..
Evet bomba gibi bir projeyle geldim flytrack adı olduğu gibi iş yapan uçuş takibinde inanılmaz fırsatlar sunan küçük bir geliştirme kartı tasarladım yakın zamanda yazılımı ile beraber günceleyeceğim bu kartı aslında kendim için yaptım diyebilirim.
Biliyorsunuz ara sıra yamaç paraşütü yapıyorum gittiğimiz yerlerde termik vs yakayabilmemiz ve rüzgarı değerlendirebileceğimiz aygıtlara ihtiyacımız oluyor genelde cep telefonundan rüzgar hızını ve yönünü tayin etsemde sadece uçuşta bu yeterli olmuyor, uçuş yaparken irtifayı, katettiğiniz yolu, mesafeyi Yükseliş hızını(m/sn) öğrenmek istiyorsunuz piyasada bu tarz cihazlar elbette var örneğin en pöpüleri FLYMASTER bu cihazın özellikleri tabi ki saymakla bitmez.
flymaster
Çok hassas sensöre sahip ve tepkileri hızlı.. Ayrıca ekranda uçuşunuz son 2 dakikalık grafiğini görebiliyorsunuz. 3 adet altimetresi var. Kapsamlı ve kolay bir menüsü var; Kişisel tercihinize göre birçok ayar yapabiliyorsunuz.
Flymaster variometre’de ‘‘next to climb indicator’’ özelliği var. Bunu; termik gösterici olarak çevirebiliriz. Ama bu görsel değil sesli bir uyarı. Normal variometrelerde ki tırmanırken (termik sırasında ısınan hava yükselirken kaldırıcı etkisini kullanarak pasif uçuş araçlarının yükselmesi) çıkan bip-bip, çöküşteki biiiip sesine ilave olarak cihazda üçüncü bir ton olarak bırr sesi var. Termik yakınlarında iken ve termikten düşerken uyarı veriyor.
Bu uyarı uçuş sırasında manzarayı seyrederken aslında insan hisleri ile anlayabilsekte yükselmyi kaçırdığımız da oluyor bu tip cihazlar size saniyenin daha da altında tepkileri görmenizi sağlıyor.
Ben de bu cihazdan esinlenerek ayrıca ısparta'daki uçuş ekibimin de tavsiyeleri üzerine böyle bir geliştirme kartı yapmayı istedim ve tasarladım biraz zamanımı aldı ama olsun. Altium Designer ile tasarladığım bu kartın resmini göstermeden önce sizlere biraz içeriğinden bahsedeyim.
Yukarda ki anlattığım variometer cihazını aynı teknoloji yapısını kullanarak şema tasarlıyoruz evet bu şema da dikkat edeceğimiz en uç nokta GPS sensörü bu sensörü elime geçen bir cihazın içerisinden almayı düşündüm yani olay şu şekilde gelişti..
Uzun zamandır vario-meter yapmayı düşünürken bu adımı atmama Ankara'ya gelen samet abim vesile oldu (sağolsun) o da yakın zamanda suya düşen bir variometer'in çalıştırıp çalıştıramayacağım hakkında sorular sorarken, dedim ki kral; "tuzlu suya düşen bir cihazın pil takılıyken kısa devreler sonucu bozulan parçalar diğer ünitelere de zamanla zarar veriyor belirli bir zaman sonra da korozyon oluşuyor yani senin cihaz çöp ben yinede bir inceleyim" cihazı alıp inceledim baktım olmayacak çalışma prensibine takıldım.. Biliyoruz fakat yahu bu adamlar bu cihazda ne kullanmış diye inceliyorsun zaman zaman ve aşağıdaki IC'leri kulandığını görünce aslında çokta bir olayı yokmuş arkadaş diyebiliyorsun.
fastrax GPS modülü
Yukarıda ki gördüğünüz gps moodülü bu cihazın içerisindeydi tabi kurtarılacak pek bir yanı yoktu piyasdaki araştırdığımız modülleri görünce de tabi ki doların yükselmesi de cabası olunca biraz duraksıyorsunuz. Normalde pahalı olan bu sensörler (hassasiyete göre 50-600$ ) biraz araştırınca 90Tl ye Neo 6m gps sensörünü piyasada oldukça iyi satılan vee biraz da düşük güç tüketimi sağlayan bir modül olduğunu gördüm ve kullanamaya karar verdim.
bizim kullandığımız Neo 6M
MCU
Yukarıdaki resim ise aynı cihazın mikro işlemcisi çok bi absürt özelliği yok 8 bit işlemci, zaten bu cihazın sensör tepkisi ve sesli uyarısı daha ön planda, termiğe kesildiğiniz dikkatinizden dolayı Lcd ekrandaki verilere aşina olamıyorsunuz. Demem o ki MCU tarafında display sürmek için ikinci bir Lcd Driver entegresine ihtiyacımız doğuyor burada haberleşmeyi de o ic ile sağlıyoruz evet grafik lcd de gerekli hesaplamalar için vakit kaybetmeden display verilerini SPI ile Lcd drivere gönderiyoruz aynı mantıkla cihazın içerisinde IF0847 engtegresi kullanılmış..
Şu aralar STM32 M3 Cortex işlemci ile kodlama yapıyorum baktım ki normalde ucuz bir işlemci ülkemizdeki iyi rağbet görüyor geliştirme kartları diğerlerine göre ucuz felan Stm32f103RB işlemcisini kullanmaya karar verdim.
Gelelim en can özelliğimiz olan IMU yani ne demek IMU ?
Accelerometer
Accelerometerlar üzerlerine düşen statik(yerçekimi) veya dinamik (aniden hızlanma veya durma) ivmeyi ölçmektedirler. Sensörden aldığımız değer m/s2 veya yer çekimi (g-Force) türünden ifade edilebilir. Uygulamalarda genelde yerçekimi türünden ifade edilmektedir. Eğer uzayda veya herhangi bir çekim alanının kapsamında değilseniz sensör üzerine 1g lik bir yerçekimi kuvveti etki etmektedir.
Buda hepinizin bildiği gibi yaklaşık olarak 9.8m/s2 dir ve dünyadaki bulunduğunuz noktaya göre değişiklik göstermektedir. Sensör sürekli olarak yer çekimi etkisi altında kaldığından eğim ölçer (örneğin cep telefonlarında olduğu gibi ) siz telefonu dikey veya yatay konuma getirdiğinizde telefonun ekranı hareketinize göre değişmektedir) veya hareket algılayıcı olarak kullanılabilmektedir hepimiz az çok kullansakta teknolijisini ve ismini ilk defa duyuyor olabilirsiniz.
Ölçü skalası olarak ± 1g, ± 2g, ± 4g ... gibi değerler ile ifade edilmektedir ve bir, iki ve üç eksende ölçüm yapabilen türevleri vardır. Şimdi bu sensörlerin nasıl çalıştığına bakalım.
Şimdi uzayda olduğunuzu düşünün. Herhangi bir çekim etkisi yok ve ağırlığınız 0'dır. Önünüzde de aşağıdaki şekildeki gibi bir kutu, kutunun ortasında da bir küre olduğunu hayal edin. Herhangi bir çekim etkisi olmadığından küre herhangi bir yüzeye temas etmeden hareketsiz bir şekilde durmaktadır.
Kürenin hareketini görebilmek için kutunun +Y yönünde kalan yüzeyini de kesip atalım.
Kutuyu elinizde tutup +X yönünde 1g kuvveti ile hızlandırdığımızda küre kutunun –X yüzeyine eylemsizlikten dolayı 1g lik bir kuvvet uygulayacaktır.
Şimdi kutumuzu alıp dünyaya dönelim. Kutuyu yere koyduğumuzda dünyamızın 1g lik yer çekimi kuvvetinden dolayı küre –Z yüzeyine 1g kuvvet uygular.
İvmeölçerlerde benzer bir şekilde çalışmaktadır.
Yüzeyleri basınca ( piezoelektrik vb) manyetik alana tepki verecek şekilde yapılmaktadır ve ivmeölçerde bu tepkiyi ölçerek bize bir değer vermektedir. Sensörün yer yüzü ile yaptığı açı değiştiğinde sensörün eksenlerine uygulanan kuvvette değişecektir ve bizde yeni değerleri okuyarak yeryüzü ile yaptığımız açıyı trigonometri yardımıyla hesaplarız. Örneğin kutumuzu 45 derece sağa doğru çevirdiğimizi düşünelim. Bu durumda kürenin –X ve –Z yüzeylerine √(0.5)'lik bir kuvvet uygulanır oda 0,707g ye eşittir.
Şimdi kutu modelinden koordinat sistemi modeline geçelim ve aşağıdaki şekli inceleyelim.
Burada R vektörü ivmeölçerimiz üzerine düşen kuvvet vektörü olsun. Bu kuvvet yukarda anlattığımız gibi yerçekimi veya sensörün hareketi sonucu yerçekimi kuvveti ile eylemsizlik kuvvetinin bileşkesi olabilir. R vektörünün 3 bileşeni vardır ve R=[Rx,Ry,Rz] olarak ifade edilmektedir. Pisagor teoreminden R vektörünü bu bileşenlerden aşağıdaki gibi hesaplayabiliriz.
R^2 = Rx^2 + Ry^2 + Rz^2
Rx, Ry ve Rz bileşenlerini bildiğimiz taktirde yukarıdaki şekilden görüldüğü gibi trigonometrik fonksiyonlar yardımı ile R vektörünün X ve Y eksenleri ile yaptığı açıları hesaplayıp sensörümüzün yeryüzüne göre konumunu bulabiliriz. R vektörünün bileşenlerinide bize ivme ölçer g kuvveti türünden vermektedir. Şimdi bir örnek yapıp konuyu anlayalım.
Analog sensör kullandığımızı, besleme gerilimimizin 3v3 olduğunu ve 10 bitlik bir ADC kullandığımızı varsayalım. Accelerometerdan ADC yardımı ile aşağıdaki binary değerleri okuduğumuzu varsayalım. Bu değerler ile işlem yapabilmek için g türünden ifade edebilmemiz gerekmektedir. Bunun içinde ADC den okuduğumuz değerleri voltaj türünden ifade etmeli ve kullandığımız sensörün datasheetinden faydalanarak bu voltaj değerlerini g kuvveti türünden ifade etmemiz gerekmektedir. Böylece elde ettiğimiz değerleri trigonometrik fonksiyonlar ile açıya çevirebiliriz.
AdcRx = 586 AdcRy = 630 AdcRz = 561
Bu değerler ham binary değelerdir ve volt türünden ifade edebilmek için LSB başına düşen gerilim miktarı ile çarpmamız gerekmektedir. Besleme 3V3 olduğundan ve 10bit ADC kullandığımızdan yukarıdaki değerleri 3.3V/ 2^10 ile çarparsak volt değerlerini elde ederiz.
Bu değerleride g türünde ifade etmemiz gerekmektedir. Her ivmeölçerin 0g de vermiş olduğu bir gerilim değeri vardır ve Zero-G değeri olarak isimlendirilmektedir. Bu değer genelde Vdd/2 dir (bizim örneğimizde 3.3/2=1.65V.
BMI160 Sensörü için zero-g offset değerleri kendi içerisinde çözümlendiği için digital değerleri alacağız.
Kullandığınız sensörün datasheetinden bakabilirsiniz. Yukarıdaki voltaj değerlerinden bu değeri çıkartıp sensörün hassasiyeti ile çarparsak hangi eksene ne kadar kuvvet uygulandığını bulabiliriz. Sensör hassasiyetide 0.4785V/g olsun. O halde tam denklemimiz aşağıdaki gibi olur ve yukarıdaki değerleri denklemde yerine koyarsak eksenlere uygulanan kuvvetleri bulabiliriz.
Şimdi yukarıdaki şekilde gösterilen R vektörünün X ve Y eksenleri ile yaptığı açıları hesaplayalım. Şekilde görülen Axr açısının cosinüsü bize Rx/R değerini vermektedir. Rx ve R değerleri bilindiğine göre arccosinüs ile Axr açısını elde edebiliriz. Benzer şekilde Ayr açısını hesaplayabiliriz. R vektörünüde yukarıdaki birinci eşitlikten hesaplayıp aşağıdaki arccos fonksiyonlarına değerleri koyduğumuzda istediğimiz açıları almış oluruz.
cos(Axr) = Rx / R , Axr = arccos(Rx/R) cos(Ayr) = Ry / R , Ayr = arccos(Ry/R) cos(Azr) = Rz / R , Azr = arccos(Rz/R)
Gyroscopes
Gyroscopelar basitçe bir tekerleğin ekseni etrafında hızlıca döndürülmesi sonucu ortaya çıkarlar. Tekerleğin etrafındaki çembere dik açıyla kenetlenmiş başka bir çember ve bu çemberlere dik açıyla tutturulmuş başka bir çember jiroskobu modeller. Jiroskobun öne çıkan iki özelliği vardır. Yatay eksende dönmekte olan bir jiroskopa yatay eksen doğrultusunda bir kuvvet uyguladığımızda yatay eksen etrafında dönmek yerine eksen etrafında dönmeye başlar.
Diğer bir özelliği ise jiroskopun dönmeye başladığı eksenin jiroskobun durduğu yüzey ne açıyla oynatılırsa oynatılsın jiroskobun dönüş ekseni sabit kalır. Bu özelliğinden dolayı uyduların sürekli olarak dünyaya dönük kalması, uçaklarda ve çeşitli araçlarda yapay ufuk oluşturulması ve otopilot gibi uygulamalarda kullanılmaktadır.
Aşağıdaki videodan anlattığım bu özellikleri görsel olarak izleyebilirsiniz.
Biz kendi variometremizi yaparken, bir şeyin bir eksen etrafında ne kadar hızla döndüğünü başka bir deyişle açısal hızını öğrenmek için kullanıyoruz ama mekanik olan görevi entegre sisteme dökümledikleri için bu verileri mekanik olmayan entegremiz yani BMI180 den alacağız.
(Burası önemli) İvmeölçerlerde olduğu gibi bir, iki veya üç eksende ölçüm yapabilen modelleri vardır (BMI180 IMU 6 Axex) ve saniyedeki dönüş hızı ölçümüne göre değerlendirilmektedirler. Bu hızların üzerindeki dönüşler sonucu sensör çıkışları anlamsız olabilmektedir. Uygulamanızda kullanacağınız sensörü bu özellikler ve hassasiyetine bakarak alabilirsiniz.
Şimdi IMU başlığında ivme ölçer ve gyroyu beraber kullanacağımızdan tekrar ivme ölçer konusunda kullandığımız koordinat sistemlerine dönelim ve sensörlerin bu modele göre nasıl kullanılabileceğine bakalım.
İki eksen (X,Y) gyro kullandığımızı düşünerek devam edelim. Buradaki R vektörünün XZ uzayındaki izdüşümü Rxz, YZ uzayındaki izdüşümü ise Ryz vektörü ile ifade edilmektedir.Bu vektörleri pisagor teoreminden
Vektörlerin Z ekseni ile yapmış olduğu açılar ise Axz ve Ayz dir. Sistemi Y ekseni etrafında döndürdüğümüzde Axy açısı, X ekseni etrafında döndürdüğümüzde ise Ayz açısı değişecektir. Gyroscope un dönüş hızını ölçtüğünü söylemiştik. Dönüş hızını zaman ile çarparsak dönüş açısını elde etmiş oluruz. t0 anındaki açımızın Axz0 olduğunu ve t1 anındaki açımızın ise Axz1 olduğunu düşünelim. O halde dönüş açımız
(Axz1 – Axz0) = RateAxz * (t1 – t0) ile ifade edilir.
Sensörden alacağımız değerleri dönüş hızına çevirmek içinse aşağıdaki formülleri kullanabiliriz.
Yine analog sensör kullandığımızı, 3v3 ile çalıştığımızı ve 10bit adc ile örnekleme yaptığımızı düşünelim. Sensörlerin hareketsiz durumda sabit olarak vermiş olduğu bir gerilim vardır ve VzeroRate olarak isimlendirilir. Bu gerilimi binary değerden elde ettiğimiz gerilimden çıkartmamız gerekmektedir.Örneğimiz için 1.23V olduğunu düşünelim. Sensör hassasiyetimiz ise volt başına 0.002 deg/s olsun. Bu değerleri kullanacağınız sensörün datasheetinden elde edebilirsiniz. gyroX ten 571 gyroY den 323 binary değerini okuduğumuzu düşünelim. Tüm bu değerleri yerine koyduğumuzda dönüş hızlarını aşağıdaki gibi buluruz.
Elde ettiğimiz değerler görüldüğü gibi açısal hızlardır. Bu değerleride iki örnekleme arasında geçen süre ile çarparsak dönüş açımızı elde ederiz. Örneğin 1ms de örnekleme yaptığımızı farz edersek X için dönüş açısı 0.306 derece, Y için dönüş açısı -0.094 derece olacaktır.
Yukarıda ki teorik bilgiler bir örnekleme olarak düşündüğümüzde bizim verileri alacağımız sensör I2C haberleşmesi sayesinde
IMU (Inertial Measurement Unit)
Gyroscope ve accelerometer tek başlarına bize yeterince ve güvenli bilgi vermezler. Bu yüzden bu iki sensörü birleştirerek yönelim, hız, pozisyon gibi bilgileri tek bir uniteden alabiliriz. Bu uniteye IMU (Inertial Measurement Unit) denilmektedir. Serbestlik derecesi DOF (Degrees of Freedom) ile ifade edilmektedirler. Örneğin 2 eksen gyro ve 3 eksen ivmeölçeriniz varsa 5DOF IMU elde etmiş olursunuz.
Gyro ve accelerometer bias drift adı verilen bir kayma yaparlar ve bundan dolayı hassas açı ölçümünde tek başlarına kullanılamazlar. Ayrıca accelerometerlar kuvvete karşı çok duyarlı olduğundan en ufak titreşimlerde çok yüksek gürültüler oluşturmaktadırlar.Gyroların bu kuvvetlerden etkilenmediğini söylemiştik. Aşağıdaki şekilde görüldüğü gibi gyrolar ivmeölçer çıkışlarını filitreleyerek daha doğru bir ölçüm yapmamızı sağlarlar.
acc/imu
Filtreleme için çeşitli algoritmalar bulunmaktadır. En yaygın olarak kullanılanlarından birtanesi kalman filitresidir. Sistemin bir önceki çıkışları ile yeni ölçümlerinden yeni çıkışları tahmin edecek şekilde çalışmaktadır.Kalman filitresinin etkisini videodan izleyebilrisiniz.
Şimdi kalman filtresine benzeyen bir örnek ile devam edelim. Bu örneğin kalman filtresinden eksiği örneğin sonunda göreceğiniz ağırlıklı ortalamanın sabit olması, kalman filtresinde ise çıkışlara göre tekrar hesaplanıp dinamik olarak kullanılmasıdır.
Başlamak için accelerometer ve gyro koordinat sistemlerini birleştirmemiz gerekmektedir. Bunun için accelerometer koordinat sistemini referans olarak seçmeli ve sensörlerin XZ ile YZ düzlemlerini çakıştırmamız gerekmektedir. Bu işlemleri yaptıktan sonra ivmeölçer verilerini filtremiz için direk giriş olarak kullanacağız. Be verilerin aşağıdaki formül ile hesaplandığını hatırlayalım.
İvmelenme (hızlanma, yavaşlama) gibi durumlarda sensör üzerine etkiyen kuvvet 1g den büyük veya küçük olabilmektedir. İşlem yapabilmek için önce R vektörünü normalize etmemiz gerekmektedir. Bunun için aşağıdaki işlemleri kullanabiliriz. Bunlar R vektörünün herzaman 1g ye eşit olmasını sağlayacaktır.
Şimdi filtre çıkışından tahmin edilen Rest = [RxEst,RyEst,RzEst] vektörümüz olsun. Yapacağımız iş accelerometer çıkışlarını okuyup gyro çıkışları ile gerçekten bir dönüş hareketi yapıyormuyuz diye karşılaştırmaktır. Bunun için t0 anında Rest(0) = Racc(0) vektörlerini birbirine eşitlememiz gerekmektedir.Daha sonra T aralıkları ile düzenli örnekler alıp yeni örnek ile önceki çıkışları işleme sokmamız gerekmektedir.Hesaplamalara gyro ile başlayalım ve vektörünü Rgyro = [RxGyro,RyGyro,RzGyro] olarak ifade edelim.
Şekilde görülen Axz açısını tan(Axz) = Rx/Rz => Axz = atan2(Rx,Rz) ile hesaplarız. Burada atan2 fonksiyonu bize açı değerini –PI ile PI aralığında verecektir. RxEst(n-1) , ve RzEst(n-1) değerlerini bildiğimiz için bir önceki Axz açısı olan Axz(n-1) şöyle hesaplayabiliriz.
Axz(n-1) = atan2( RxEst(n-1) , RzEst(n-1) )
Gyro Axz açısının değişim hızını ölçtüğünden yeni Axz açısını Axz(n) = Axz(n-1) + RateAxz(n) * T şeklinde hesaplayabiliriz. İfade kolaylığı açısından |Rgyro| = 1 x =RxGyro , y=RyGyro, z=RzGyro yazalım.
x = x / 1 = x / SQRT(x^2+y^2+z^2) eşitliğinde payı ve paydayı SQRT(x^2 + z^2)e bölelim. Yeni sonucumuz
x = ( x / SQRT(x^2 + z^2) ) / SQRT( (x^2 + y^2 + z^2) / (x^2 + z^2) ) şeklinde olacaktır. x / SQRT(x^2 + z^2) = sin(Axz) olduğundan
x = sin(Axz) / SQRT (1 + y^2 / (x^2 + z^2) ) yazabiliriz. Şimdi kökün içindeki pay ve paydayı z^2 ile çarpalım.
x = sin(Axz) / SQRT (1 + y^2 * z ^2 / (z^2 * (x^2 + z^2)) ) elde ederiz. z / SQRT(x^2 + z^2) = cos(Axz) ve y / z = tan(Ayz) olduğundan
RxGyro = sin(Axz(n)) / SQRT (1 + cos(Axz(n))^2 * tan(Ayz(n))^2 ) RyGyro = sin(Ayz(n)) / SQRT (1 + cos(Ayz(n))^2 * tan(Axz(n))^2 ) şeklinde elde ederiz. gyroZ ise RzGyro = Sign(RzGyro)*SQRT(1 – RxGyro^2 – RyGyro^2) şeklindedir. Burada RzGyro>=0 olduğunda Sign(RzGyro) = 1 , ve RzGyro<0 olduğunda Sign(RzGyro) = -1 olur. Ayrıca Rz Axz ve Ayz açılarını hesaplamada kullanıldığından 0 a yaklaştığında istenmeyen sonuçlar elde edilebilir. Bu durumda bir önceki çıkışları yeni gyro ölçümü olarak alabiliriz. Şimdi elimizde Racc ve Rest(n-1) vektöründen elde ettiğimiz Rgyro vektörleri olduğuna göre Rest(n) vektörünü hesaplayalım. Bunun için ağırlıklı ortalama alacağız.
Rest(n) = (Racc * w1 + Rgyro * w2 ) / (w1 + w2)
Formülde pay ve paydayı w1 ile bölüp w2/w1 = wGyro yazarsak
Rest(n) = (Racc + Rgyro * wGyro ) / (1 + wGyro) denklemini elde ederiz. Burada wGyro accelerometera oranla gyroya ne kadar güvenebileceğimizi belirtmektedir. Starlino 5-20 arası değerlerin deneysel olarak iyi sonuç verdiğini yazmış. Rest vektörünüde normalize ederek açı hesaplamasında kullanabiliriz.
Yukarıdaki algoritmada wGyro değeri sabit bir değerdir fakat Kalman filtresinde bu değer accelerometer gürültüsü analiz edilerek yeniden hesaplanmaktadır. Kalman filitresi sistemin sürekli değişen girişlerini izleyerek bir sonraki çıkışın en iyi değerini tahmin etmektedir.Görüntü işlemeden, yönelim, hareket takibi gibi bir çok alanda kullanılmaktadır.
GPS & IMU
İşte final başlığımızın altındayı burada görmenizi isteyeceğim çok şey var vakit kaybetmeden anlamaya ve açıklamaya başlayalım kodlamada en önemli Mühendislik hesabı aslında bu ikisi diğerleri Sıcaklık sensöründen veri almaya benzeyebilir devam ediyoruz..


















































{kind=link}